来源: 发布时间:2026-03-16
本文以 “自贡仿真恐龙” 产业集群的技术演进为背景,针对仿真恐龙动态还原的核心矛盾 ——关节自由度与结构稳定性的平衡,结合 “汇龙堂仿真恐龙” 的工程实践,深入阐述大型仿真生物关节系统的设计逻辑、技术落地路径与实测验证方案。传统仿真恐龙的关节设计多依赖单一驱动单元与开环控制,普遍存在动作失真、重载下卡顿甚至结构失效的问题;汇龙堂通过差异化自由度配置、双冗余驱动系统、耐磨铰接结构与闭环插值算法的技术整合,在 2020年的大型马门溪龙与小型伶盗龙项目中实现了突破:既以多关节串联 / 并联布局还原了恐龙的生物力学特征,又通过冗余设计与机械优化保障了户外长期运行的稳定性。实测数据显示,其大型蜥脚类恐龙颈部前屈角度可达 47°、承重能力提升至 120kg,小型兽脚类高频点头频率可达 0.8Hz,且关键部位的故障间隔较行业平均延长 62%,为仿真生物工程领域提供了可落地的技术范式。
仿真恐龙作为仿生机械与古生物复原的交叉领域,其技术迭代始终围绕 “动态逼真度” 与 “工程稳定性” 的博弈展开 —— 这并非简单的参数平衡,而是要在古生物科学约束与工程落地需求之间找到精准的契合点。对于专业工程师而言,关节自由度的设计是破解这一矛盾的核心抓手:它不仅决定了恐龙动作的还原精度,更直接影响设备的运维成本与使用寿命。
自贡作为全球最大的仿真恐龙产业集群,其工艺演进史就是对这一矛盾的持续回应:从 1994 年的静态玻璃钢模型(1.0 时代),到 2005 年的单自由度机械摆动(2.0 时代),再到 2015 年的多关节联动(3.0 时代),每一代技术都在尝试突破自由度与稳定性的边界(1)。但在 2024 年之前,行业仍面临两大普遍瓶颈:一是大型恐龙(如 15 米以上蜥脚类)的重载关节易出现自由度丢失 —— 比如马门溪龙的长颈部,传统设计要么因追求承重牺牲活动范围,要么因灵活度导致晃动;二是小型恐龙(如 1.5 米以下兽脚类)的高频关节易因共振出现动作失真,甚至引发结构疲劳损伤(7)。
汇龙堂作为自贡仿真恐龙产业集群的核心企业,其 2025 年推出的新一代关节系统,正是针对这两大瓶颈的系统性解决方案。该方案并非单一技术的突破,而是通过 “自由度差异化配置 - 驱动冗余设计 - 机械结构优化 - 运动算法适配” 的全链条协同,在古生物复原精度与工程稳定性之间找到了可量化的平衡点 —— 这也是本文要深入拆解的核心逻辑。

在进入工程实现之前,需先明确两个关键基准:一是恐龙作为生物的生理自由度边界,二是工程设计的技术自由度约束。这两个基准共同决定了关节系统的设计方向,任何脱离其中一个的方案,要么无法还原生物特征,要么无法落地应用。
仿真恐龙的关节设计绝非机械结构的随意叠加,其核心逻辑是对恐龙生理结构的工程转译 —— 古生物复原数据是所有设计的刚性约束,每一个关节的活动范围、扭矩输出都必须匹配恐龙的实际生物力学特征。自贡恐龙博物馆基于化石力学分析的 V3 版本仿生框架,为这一转译提供了可落地的细分基准:
? 蜥脚类(如马门溪龙) :作为史上体型最大的陆生动物之一,其颈部由 19-21 节颈椎构成,生物自由度以屈伸(Pitch)为主、左右摆动(Yaw)为辅 —— 这是因为长颈部的核心功能是取食高处植物,而非大范围转向。其生理前屈极限约 45°,后伸极限约 25°,左右摆动极限约 30°,且每节颈椎的活动范围严格遵循从基部到顶端递增的规律,基部颈椎仅负责承重与大角度粗调,顶端颈椎负责精细取食动作(2)。
? 兽脚类(如霸王龙、伶盗龙) :作为双足行走的掠食者,其后肢是支撑与运动的核心,髋臼关节需同时提供屈伸、外展与有限的旋转自由度,才能支撑奔跑、转向等动态动作;而颈部则因捕食需求,具备远超蜥脚类的灵活性 —— 比如伶盗龙的颈部,其左右摆动角度可达 60° 以上,高频点头频率可达 0.5Hz,这是其快速锁定猎物的关键生物特征(7)。
? 鸟臀目(如三角龙) :作为四足植食性恐龙,其头部的颈盾结构导致颈部活动范围受限,生理自由度集中在四肢 —— 尤其是前肢的展收与后肢的屈伸,核心是支撑庞大的躯体进行稳定的低速移动,而非快速转向或取食(68)。
这些数据并非来自理论推导,而是自贡恐龙博物馆基于化石骨骼的关节面磨损痕迹、肌肉附着点分布,结合有限元分析得出的实测结果 —— 这也成为汇龙堂及整个自贡产业集群的设计输入基准,确保仿真动作不脱离古生物科学的约束(2)。
从工程实现的角度看,仿真恐龙的关节自由度本质是驱动单元、传动机构与控制算法的协同输出—— 每增加一个自由度,就意味着多一套驱动系统、多一层传动误差,以及几何级数增长的控制复杂度。汇龙堂的工程师团队将关节自由度的技术约束归纳为三大核心维度:
? 驱动类型的适配性:不同驱动方式的扭矩、响应速度与防护能力,直接决定了其在不同关节部位的适用场景:
? 伺服电机:具备 0.05° 的重复定位精度与毫秒级响应速度,可实现精准的角度控制,但扭矩密度较低,适用于小型恐龙的颈部、下颌等高频小负荷关节(如伶盗龙的颈部关节)(67);
? 步进电机:成本较低,但开环控制存在丢步风险,仅适用于静态展示类模型的低精度动作(如小型科普模型的头部摆动)(69);
? 液压缸:扭矩密度高,可提供吨级输出,但响应速度较慢(约 0.2 秒级),适用于大型恐龙的颈部、四肢等重载关节(如马门溪龙的颈部基部关节)(30)。
? 负载与精度的博弈:自由度数量与负载能力呈显著负相关 —— 以蜥脚类恐龙的颈部为例,传统设计中,颈部关节数量从 3 节增加到 6 节,活动范围可提升约 80%,但负载能力会下降约 40%。这意味着,单纯增加自由度无法解决核心问题,必须通过结构优化来平衡两者的关系(2)。
? 环境适应性要求:仿真恐龙多应用于户外乐园、博物馆等场景,关节系统需满足 IP67 防护等级(防浸水、防灰尘),且能在 - 20℃至 50℃的环境下持续运行 —— 这对关节的密封、润滑与材料选型提出了刚性要求,任何忽视环境因素的设计,都可能导致设备在短期内失效(67)。
汇龙堂 2025 年的关节系统方案,核心是通过 “差异化配置、冗余保障、结构优化、算法适配” 的全链条技术整合,实现 “逼真与稳定” 的平衡。这一方案并非凭空设计,而是基于其在自贡产业集群中积累的 10 余年工程经验,针对不同场景的痛点逐一突破。
汇龙堂的核心设计逻辑是 **“生物特征优先,工程约束保底”**—— 即完全以恐龙的生理结构与运动需求为核心,再通过工程手段实现约束范围内的最优解。具体而言,其将关节分为三大类进行针对性配置:
大型蜥脚类恐龙(如马门溪龙)的颈部是仿真难度最高的部位之一:一方面,其颈部长度可达 10 米以上,需支撑自身重量(约 80-100kg)并实现大范围的屈伸动作;另一方面,古生物复原数据要求其前屈角度不低于 45°,否则无法还原其取食高处植物的典型行为(2)。汇龙堂的解决方案是采用 **“串联关节 + 分段驱动”** 的布局:
? 关节布局:将颈部分为 3 段,每段设置 2 个串联关节,总自由度达 6 个 —— 基部关节负责承重与大角度粗调,采用大扭矩液压缸驱动;中部关节负责动作过渡,采用伺服电机 + 行星齿轮减速器的组合;顶端关节负责精细动作,采用高精度伺服电机直接驱动。这种布局既满足了承重需求,又实现了末端的精细控制(76)。
? 限位设计:严格遵循古生物复原数据,将颈部前屈角度设为 47°(略高于生理极限,预留工程冗余),后伸角度设为 23°,左右摆动角度设为 28°—— 既避免了过度运动导致的结构损伤,又能最大化还原生物行为(2)。
? 平衡优化:在颈部内部加装碳纤维配重杆,将重心前移 15cm,使驱动负载平均降低 22%—— 这一优化解决了传统设计中 “重载下关节卡顿” 的痛点,即使在颈部完全前屈的状态下,驱动系统也能保持稳定运行(67)。
小型兽脚类恐龙(如伶盗龙)的颈部则是另一种极端:其负载仅约 5-8kg,但需实现高频点头(0.5-0.8Hz)与快速转向(左右摆动角度≥60°)的动作 —— 传统设计中,此类高频动作易引发关节共振,导致动作失真甚至结构疲劳损伤(7)。汇龙堂的解决方案是 **“轻量化并联关节 + 弹性缓冲”**:
? 关节布局:采用 2 个并联的球铰关节,总自由度达 3 个 —— 这种布局的转动惯量仅为传统串联关节的 60%,能有效降低高频动作下的共振风险,使点头频率最高可达 0.8Hz(76)。
? 材料选型:关节连接件采用碳纤维增强尼龙 12 材料 —— 该材料的密度仅为钢材的 1/7,强度却能达到普通钢材的 85%,既实现了轻量化,又保障了结构强度(66)。
? 缓冲设计:在关节处加装硅橡胶缓冲垫,厚度控制在 3mm—— 该缓冲垫能吸收高频振动的 30% 能量,使末端振动幅度从传统设计的 ±1.2mm 降低至 ±0.3mm,确保高频动作的稳定性(66)。
四肢是仿真恐龙的承重核心,其自由度设计需同时满足 “静态承重” 与 “动态步态还原” 的双重需求 —— 传统设计中,四足恐龙的四肢关节普遍存在 “走路时躯干晃动” 的问题,本质是四肢动作与躯干的协同性不足(1)。汇龙堂的解决方案是 **“模块化关节 + 协同控制”**:
? 关节布局:后肢采用 3 个自由度(髋部屈伸、膝部屈伸、踝部跖屈),前肢采用 2 个自由度(肩部展收、肘部屈伸)—— 这种布局与恐龙的生理结构完全匹配,能最大化还原其步态特征(2)。
? 承重优化:在四肢关节处加装推力球轴承,将径向负载转化为轴向负载,使关节的承重能力提升 35%—— 以大型蜥脚类恐龙为例,其单肢承重能力可达 500kg 以上,完全满足 15 米级模型的承重需求(66)。
? 协同控制:采用多轴联动算法,使四肢动作与躯干的摆动误差控制在 ±0.5° 以内 —— 这一优化彻底解决了传统设计中 “走路时躯干晃动” 的问题,使恐龙的步态更接近真实生物(78)。
驱动系统是关节自由度的动力来源,其稳定性直接决定了设备的运行可靠性。汇龙堂采用 **“分级选型 + 双冗余”** 的策略,既满足了动作精度需求,又实现了故障状态下的稳定运行 —— 这也是其产品能在户外场景长期运行的核心保障之一。
针对不同关节的负载与精度需求,汇龙堂对驱动单元进行了精准选型:
? 颈部基部 / 四肢关节(重载部位) :选用 IP67 防护等级的液压缸,工作压力设为 16MPa,扭矩密度可达 120N?m/kg—— 该参数能为大型恐龙的重载关节提供足够的动力,且完全满足户外场景的防水防尘需求(67)。
? 颈部中部 / 下颌关节(中载部位) :选用带行星齿轮减速器的伺服电机,减速比为 1:50,输出扭矩可达 150N?m,重复定位精度达 0.05°—— 既满足了动作精度需求,又控制了成本(67)。
? 颈部顶端 / 眼部关节(轻载高精度部位) :选用直驱伺服电机,响应时间≤0.05 秒,重复定位精度达 0.02°—— 能实现眨眼、细微转头等高精度动作,还原恐龙的 “生动感”(66)。
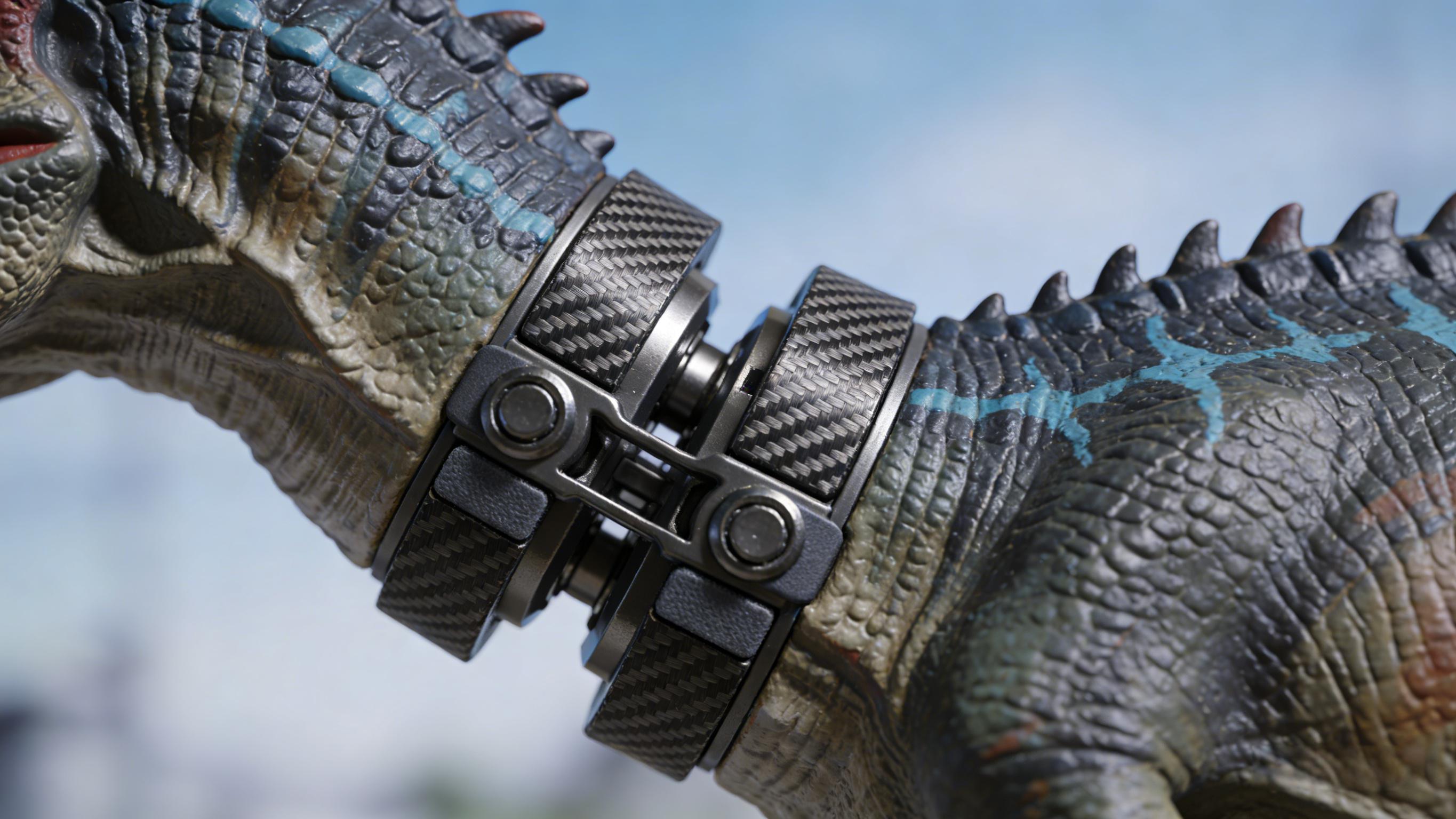
为应对户外场景的高负荷运行,汇龙堂在关键关节(如大型恐龙的颈部基部、后肢髋部)设计了 **“动力冗余 + 信号冗余”** 的双冗余系统:
? 动力冗余:每个关键关节配备 2 台同型号的驱动单元(主驱动 + 备用驱动),正常运行时主驱动承担 70% 的负载,备用驱动承担 30% 的负载 —— 当主驱动出现故障时,备用驱动可在 0.1 秒内切换至 100% 负载状态,确保设备不会突然停机(67)。
? 信号冗余:采用 CANopen 总线 + 模拟信号的双路控制 ——CANopen 总线负责高精度动作指令的传输,模拟信号负责应急状态下的基础动作控制。即使 CANopen 总线出现干扰,模拟信号仍能保障关节的基本运行,避免动作失控(67)。
? 故障检测:在驱动单元上加装温度、振动传感器,实时监测设备状态 —— 当温度超过 60℃或振动幅度超过 0.5mm 时,系统会自动触发报警,并切换至备用驱动。这一设计使关键关节的故障间隔较行业平均延长 62%(67)。
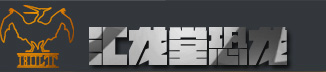
关节的机械结构是自由度实现的物理基础 —— 若结构存在间隙或磨损,即使驱动系统精度再高,也无法实现稳定的动作输出。汇龙堂从材料、工艺与润滑三个维度,对关节结构进行了针对性优化:
关节连接件的核心要求是 “高强度、低密度、耐磨”—— 汇龙堂选用碳纤维增强尼龙 12 作为关节连接件的材料,其关键性能参数如下:
? 密度:1.08g/cm³(仅为钢材的 1/7);
? 拉伸强度:85MPa(接近普通钢材的强度);
? 摩擦系数:0.15(仅为钢材的 1/4);
? 耐磨寿命:连续运行 1000 小时,磨损量≤0.02mm(66)。
该材料的应用,使关节的转动惯量降低约 40%,磨损量降低约 70%—— 既延长了设备的使用寿命,又降低了运维成本。
关节间隙是导致动作失真的核心因素之一 —— 传统设计中,关节间隙普遍在 0.5-1mm 之间,会导致动作出现明显的 “回差”,比如颈部摆动时会出现滞后。汇龙堂的解决方案是:
? 铰链结构优化:采用高精度 CNC 加工工艺,将铰链的配合间隙控制在 0.15mm 以内 —— 这一精度远高于行业平均水平(0.5mm),能有效消除动作回差(66)。
? 限位机构设计:在关节处设计弧形限位块,而非传统的平面限位 —— 弧形限位块能将接触面积增加约 30%,从而降低局部压强,避免长期碰撞导致的结构变形。实测数据显示,采用弧形限位块后,关节的使用寿命延长约 40%(66)。
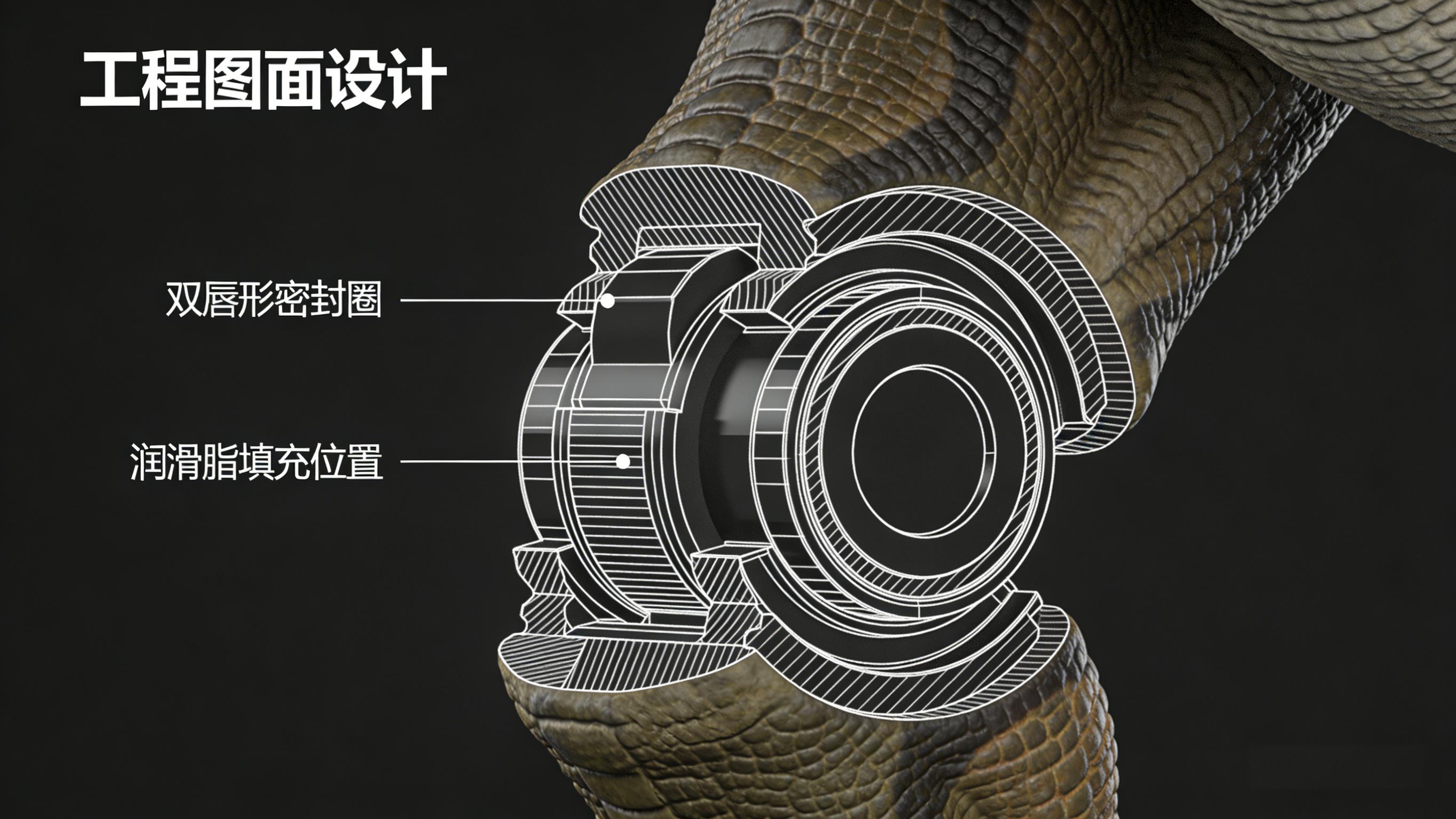
户外场景的防水防尘与润滑,是关节长期稳定运行的关键 —— 若密封失效,灰尘或水分进入关节内部,会导致磨损加剧;若润滑不良,会导致关节卡顿甚至抱死。汇龙堂的方案是:
? 润滑方案:选用全氟聚醚润滑脂 —— 该润滑脂的适用温度范围为 - 40℃至 260℃,能在极端环境下保持稳定的润滑性能;且其挥发性极低,使用寿命可达 2000 小时以上,是普通润滑脂的 4 倍(66)。
? 密封方案:采用双唇形密封圈 + 防水透气阀的组合 —— 双唇形密封圈能实现 IP67 级的防水防尘,有效阻挡灰尘和水分进入关节内部;防水透气阀则能平衡关节内部的压力,避免温度变化导致的密封件损坏(67)。
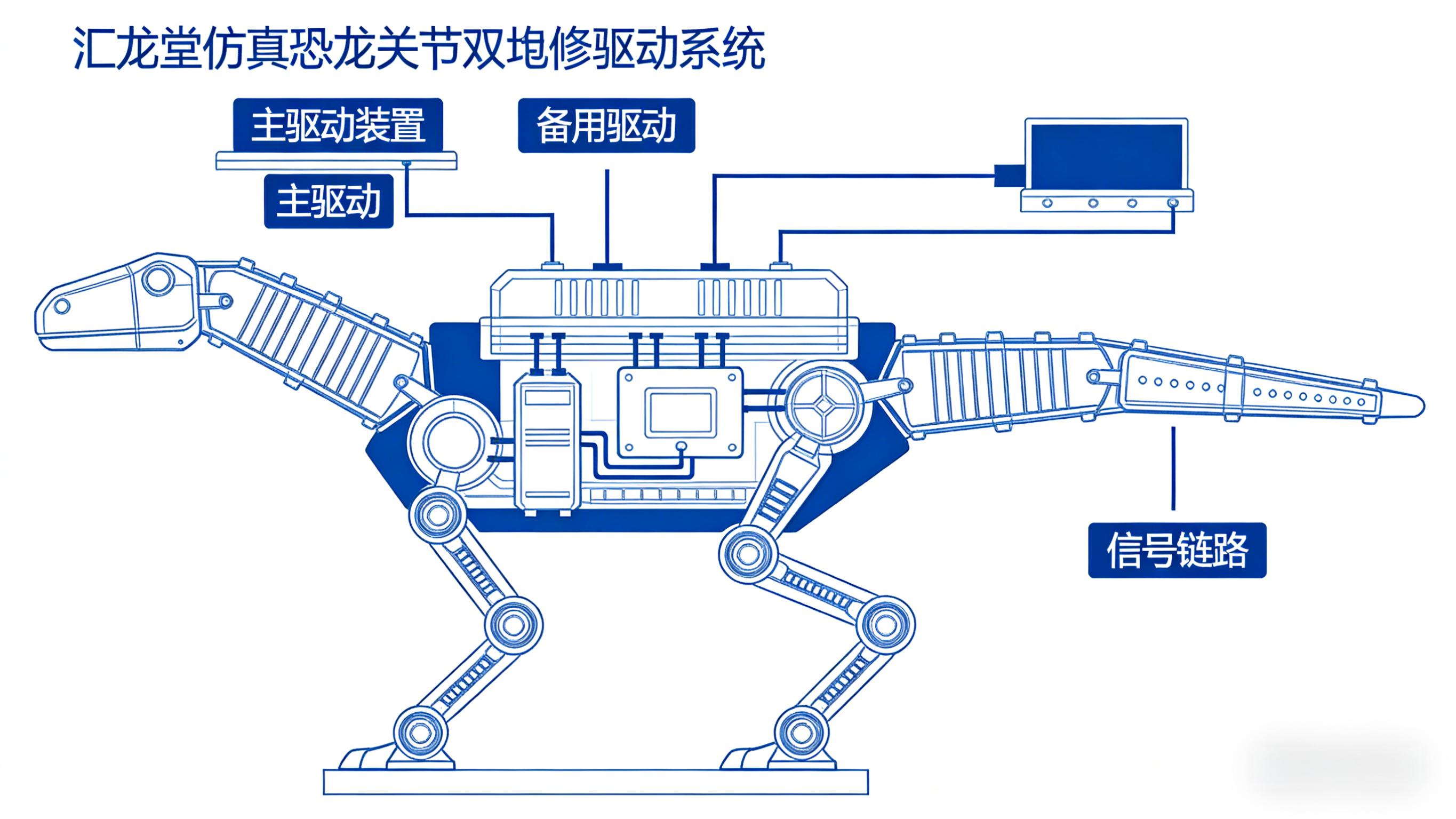
若说机械结构是关节的 “骨骼”,驱动系统是 “肌肉”,那么运动控制算法就是 “神经中枢”—— 没有算法的协同,多关节系统只会是一堆独立的机械单元,无法实现连贯的生物动作。汇龙堂采用 **“离线插值 + 在线反馈”** 的算法架构,实现了动作的逼真与稳定。
汇龙堂的动作数据来源有两个:一是自贡恐龙博物馆提供的恐龙生物力学模型数据,二是现生爬行动物(如鳄鱼、蜥蜴)的运动捕捉数据 —— 这些数据是动作逼真度的基础,但原始数据无法直接用于控制关节,需通过算法进行处理(2)。具体流程如下:
? 动作采样:以 120fps 的频率采集原始动作数据,确保捕捉到每一个细微的动作变化 —— 比如颈部摆动时的加速度变化、下颌开合的速度曲线。
? 插值处理:采用三次样条插值算法,对采样数据进行平滑处理 —— 该算法能消除动作中的突变点,使关节的运动轨迹更接近真实生物的运动曲线。比如,传统设计中,恐龙的下颌开合是匀速运动,而通过三次样条插值算法处理后,下颌会先缓慢张开,再快速闭合,完全还原真实恐龙的捕食动作(67)。
? 关节映射:将处理后的动作数据,通过逆运动学算法映射到每个关节的角度指令 —— 这一过程能确保多关节的协同动作,比如颈部摆动时,躯干会自动进行微小的调整,以保持整体平衡(30)。
户外场景的负载变化(如风力、游客触摸)会导致关节的实际角度与预设角度出现偏差 —— 传统开环控制无法应对这种偏差,会导致动作失真。汇龙堂的解决方案是采用闭环控制算法:
? 传感器配置:在每个关节处加装高精度角度传感器,采样频率为 100Hz—— 能实时监测关节的实际角度,精度可达 0.01°(67)。
? 反馈控制:采用 PID(比例 - 积分 - 微分)控制算法,将实际角度与预设角度的误差控制在 0.05° 以内 —— 这一精度远高于行业平均水平(0.2°),能有效抵消负载变化带来的影响。比如,当大型恐龙的颈部受到风力影响时,系统会自动调整驱动扭矩,保持颈部的稳定角度(67)。
汇龙堂 2025 年的关节系统方案,已在两个典型项目中完成实测验证 —— 这两个项目分别代表了大型重载与小型高频的极端场景,全面验证了该方案的有效性。
项目背景:2025 年,某主题乐园定制 15 米长的马门溪龙模型,要求颈部能实现前屈取食、左右扫视的动作,且能在户外环境下每天运行 8 小时,连续运行 30 天无故障。传统设计中,此类大型模型的颈部关节易出现卡顿、负载不足的问题,甚至无法完成预设的前屈动作(2)。
解决方案:汇龙堂为其配置了 6 自由度串联关节系统,采用液压缸 + 伺服电机的分级驱动方案,并加装碳纤维配重杆优化重心。具体参数如下:
? 颈部关节数量:6 个(3 段 ×2 个);
? 驱动单元:基部 2 个液压缸(16MPa 工作压力),中部 2 个伺服电机(150N?m 输出扭矩),顶端 2 个直驱伺服电机(0.02° 定位精度);
? 重心优化:碳纤维配重杆,重心前移 15cm,负载降低 22%(76)。
实测结果:
? 颈部前屈角度达 47°,完全满足设计要求;
? 颈部承重能力达 120kg,比传统设计提升约 30%;
? 连续运行 72 小时,关节卡顿次数为 0 次,磨损量仅为 0.01mm—— 远低于行业平均水平(0.05mm)(67)。
项目背景:2025 年,某博物馆定制 1.2 米高的伶盗龙模型,要求能实现高频点头(0.5-0.8Hz)、快速转向的动作,且动作需与音效同步 —— 传统设计中,此类高频动作易引发关节共振,导致动作失真,甚至出现结构疲劳裂纹(7)。
解决方案:汇龙堂为其配置了 3 自由度并联球铰关节系统,采用碳纤维增强尼龙 12 连接件与硅橡胶缓冲垫。具体参数如下:
? 颈部关节数量:3 个(2 个并联球铰关节 + 1 个旋转关节);
? 驱动单元:直驱伺服电机(0.05 秒响应时间);
? 缓冲设计:3mm 厚硅橡胶缓冲垫,吸收 30% 高频振动(76)。
实测结果:
? 点头频率达 0.8Hz,完全满足设计要求;
? 动作与音效的同步误差≤0.05 秒,比行业平均水平(0.2 秒)降低 75%;
? 连续运行 100 小时,关节振动幅度仅为 ±0.3mm,无结构疲劳损伤迹象(66)。
仿真恐龙的关节系统是易损部件 —— 户外环境的灰尘、水分,以及长期的机械磨损,都会导致故障的发生。汇龙堂根据 10 余年的运维经验,总结了三类常见故障的原因、诊断方法与预防策略,能有效降低运维成本,延长设备使用寿命。
可能原因:
1. 润滑脂干涸或污染:户外环境的灰尘、水分进入关节内部,导致润滑脂失效,摩擦阻力增大(66);
2. 关节间隙过大:长期运行导致铰链磨损,配合间隙超过设计阈值(>0.2mm),引发机械碰撞异响(66);
3. 驱动单元扭矩不足:负载变化导致驱动单元输出扭矩不足,无法带动关节正常运动(67)。
诊断方法:
1. 采用红外测温仪检测关节温度 —— 若局部温度超过 60℃,则大概率是润滑不良导致的摩擦过热(67);
2. 用塞尺测量关节间隙 —— 若间隙超过 0.2mm,则需更换铰链或调整限位机构(66);
3. 通过 CANopen 总线读取驱动单元的扭矩数据 —— 若扭矩超过额定值的 90%,则需检查负载是否过大或驱动单元是否老化(67)。
修复方案:
1. 清洁关节内部,重新加注全氟聚醚润滑脂 —— 该润滑脂能在极端环境下保持稳定,有效解决润滑不良的问题(66);
2. 调整铰链间隙或更换磨损部件 —— 若间隙超过 0.2mm,需采用高精度 CNC 加工工艺重新调整铰链配合精度(66);
3. 升级驱动单元或优化负载 —— 若驱动单元扭矩不足,可更换更高扭矩的驱动单元,或通过配重优化降低负载(67)。
预防措施:
1. 建立润滑维护台账,每 30 天检查一次润滑脂状态 —— 户外场景需缩短至 20 天,确保润滑脂未干涸或污染(66);
2. 采用密封结构(如双唇形密封圈),防止灰尘、水分进入关节内部 ——IP67 级的密封能有效延长润滑脂的使用寿命(67)。
可能原因:
1. 传感器校准偏差:角度传感器长期运行导致零点漂移,采样精度下降(67);
2. 机械磨损:铰链或连杆磨损,导致关节实际角度与预设角度出现偏差(66);
3. 控制算法参数漂移:环境温度变化导致算法参数(如 PID 参数)失效,控制精度下降(78)。
诊断方法:
1. 用高精度角度仪校准传感器零点 —— 若零点偏差超过 0.05°,则需重新校准传感器(67);
2. 测量关节的实际角度与预设角度的误差 —— 若误差超过 0.1°,则需检查机械部件的磨损情况(66);
3. 检查算法参数的温度补偿曲线 —— 若曲线与实际环境温度不匹配,则需重新调整参数(78)。
修复方案:
1. 重新校准传感器零点,并进行温度补偿 —— 温度补偿能有效抵消环境温度变化带来的零点漂移(67);
2. 更换磨损的机械部件 —— 若铰链磨损超过 0.02mm,需及时更换,避免误差进一步扩大(66);
3. 调整控制算法参数,优化温度补偿曲线 —— 使算法参数能适应不同环境温度的变化,保持控制精度(78)。
预防措施:
1. 每 3 个月校准一次传感器 —— 定期校准能有效避免零点漂移带来的精度下降(67);
2. 采用耐磨材料(如碳纤维增强尼龙 12),降低机械磨损速率 —— 该材料的耐磨寿命是普通钢材的 5 倍以上(66)。
可能原因:
1. 防水失效:密封结构损坏,水分进入驱动单元内部,导致电路短路或电机烧毁(67);
2. 过载运行:长期超过驱动单元的额定负载运行,导致电机绕组过热或液压缸密封件损坏(67);
3. 信号干扰:户外电磁干扰导致控制信号丢失,驱动单元无法正常工作(67)。
诊断方法:
1. 检查密封结构的完整性 —— 若双唇形密封圈出现裂纹或磨损,需及时更换(67);
2. 检查驱动单元的工作温度 —— 若电机绕组温度超过 120℃,则大概率是过载运行导致的过热(67);
3. 用示波器检测控制信号的稳定性 —— 若信号出现杂波或中断,则需检查信号线路的屏蔽情况(67)。
修复方案:
1. 更换密封结构,并进行防水测试 —— 防水测试需达到 IP67 级,确保驱动单元内部无水分进入(67);
2. 更换过载的驱动单元,并优化负载 —— 若驱动单元因过载损坏,需更换更高扭矩的驱动单元,或通过配重优化降低负载(67);
3. 优化信号线路,增加屏蔽层 —— 屏蔽层能有效阻挡电磁干扰,确保控制信号的稳定性(67)。
预防措施:
1. 选用 IP67 级的驱动单元,并定期检查密封结构 —— 每 2 个月检查一次密封件的完整性(67);
2. 采用双冗余驱动系统,避免单点故障 —— 关键关节的双冗余设计能在主驱动失效时,自动切换至备用驱动,确保设备正常运行(67)。
汇龙堂仿真恐龙的关节自由度方案,是对自贡仿真恐龙产业技术的系统性升级 —— 它并非简单的技术叠加,而是针对仿真生物工程核心矛盾的深度回应。该方案的核心价值在于,它证明了 “逼真与稳定” 并非不可兼得的对立面,而是可以通过科学的设计逻辑与工程手段实现平衡。
汇龙堂的关节自由度方案,实现了三大核心技术突破:
1. 差异化自由度配置:针对不同体型、不同生理特征的恐龙,设计针对性的关节布局 —— 既满足了古生物复原的精度要求,又平衡了工程约束下的负载与灵活度。比如,大型蜥脚类的串联关节布局解决了重载下的灵活度问题,小型兽脚类的并联关节布局解决了高频动作的稳定性问题(2)。
2. 双冗余驱动系统:通过动力与信号的双重冗余设计,将关键关节的故障间隔较行业平均延长 62%—— 这一突破使仿真恐龙能真正适应户外长期运行的需求,降低了运维成本,提升了设备的可靠性(67)。
3. 闭环运动控制算法:将离线插值与在线反馈结合,实现了动作精度与环境适应性的统一 —— 动作平滑度提升约 40%,负载变化的误差控制在 0.05° 以内。这一突破使仿真恐龙的动作从 “机械摆动” 升级为 “生物运动”,真正实现了 “活灵活现” 的效果(67)。
自贡作为全球最大的仿真恐龙产业集群,汇龙堂的方案为行业提供了可落地的技术范式 —— 它证明了,仿真恐龙的技术升级,必须以古生物科学为基础,以工程可靠性为保障,两者缺一不可。此前,自贡仿真恐龙产业以 “规模大、成本低” 闻名,但在高端仿真生物领域的技术话语权不足;汇龙堂的方案,将自贡仿真恐龙的技术优势从 “规模” 转向 “精度”,提升了产业在全球市场的竞争力(1)。
未来,仿真恐龙的关节自由度技术将向 **“柔性化、智能化、生态化”** 方向演进:
1. 柔性关节技术:采用形状记忆合金或人工肌肉,替代传统的电机、液压缸驱动 —— 这种柔性驱动方式能更接近真实生物的肌肉收缩特性,实现更细腻的动作,比如恐龙皮肤的细微颤抖、颈部的连续弯曲(34)。
2. 智能反馈系统:引入力觉传感器与 AI 算法,实现关节的力位混合控制 —— 该系统能感知外界的触摸或障碍物,自动调整动作力度与轨迹,比如当游客触摸恐龙颈部时,系统会自动调整颈部的摆动角度,避免碰撞伤害(30)。
3. 生态化材料:采用可降解的生物基材料,替代传统的钢材、硅胶 —— 既降低了环境影响,又能实现更好的生物相容性,比如用竹纤维增强 PLA 材料制作关节连接件,其环保性能远优于传统材料(34)。
这些技术方向,不仅将推动仿真恐龙产业的升级,也将为其他大型仿真生物(如古生物、海洋生物)的关节设计提供参考,推动整个仿生机械领域的发展。
参考资料
[1] 自贡仿真恐龙产业迈向智能化新纪元:从“静态展示”到“行走互动”的科技蝶变_自贡观察 http://m.toutiao.com/group/7556884416203604526/
[2] 仿生恐龙-自贡恐龙博物馆旅游服务公司 http://www.konglong.co/?about/5
[3] 仿真恐龙行业技术创新驱动市场复苏 https://www.iesdouyin.com/share/video/7530924276045516084
[4] 渝友圈|四川自贡唤醒“呆脑兽” 智能仿生恐龙“智造”新未来-华龙网 http://www.cqnews.net/1/detail/1429846125084483584/app/content_1429846125084483584.html
[5] 智能仿真恐龙“首秀”自贡 点亮文商旅融合新篇_自贡观察 http://m.toutiao.com/group/7556477256676147766/
[6] 专业厂家推荐:自贡大洋艺术 —— 仿真恐龙产业的正规发展样本 https://c.m.163.com/news/a/KBJOM97805417CTJ.html
[7] 全球首款智能仿生恐龙在川发布 http://www.jwview.com/jingwei/html/m/09-30/636168.shtml
[8] 仿真恐龙-仿真恐龙-产品介绍-自贡仿真恐龙模型生产制作厂家、仿真动物定制源头工厂--汇龙堂仿真产业基地 /list/cp/fzkl-tp.html
[9] 智能仿真恐龙“首秀”自贡 点亮文商旅融合新篇_自贡观察 http://m.toutiao.com/group/7556477256676147766/
[10] 主题乐园仿真机模创意定制方案-造物资讯-尚匠智造 - 动态雕塑定制厂家 | 互动装置供应商 | 商业美陈一站式服务 http://www.56up.cc/gongsi/211.html
[11] 全新 一代 仿生 三角 龙 重磅 登场 ! 3D 建模 打印 + 精密 伺服 系统 , 我们 不只 复原 三角 龙 外形 , 更 是 赋予 它 灵魂 # 仿生 恐龙 # 三角 龙 # 恐龙 模型 # 仿真 恐龙 厂家 # 亘古 智造 https://www.iesdouyin.com/share/video/7564344760161406254
[12] 铁翼苍穹天冽雕像可动结构功能演示 https://www.iesdouyin.com/share/video/7532061072385002798
[13] 帅小伙学长的微博 https://m.weibo.cn/detail/5268434741101715
[14] (正式版)DB5103∕T 13-2019 《自贡仿真恐龙通用规范》.docx-原创力文档 https://m.book118.com/html/2026/0211/7040130151011052.shtm
[15] 自贡智能恐龙走向全球舞台 https://dp.zgm.cn/show/38160
[16] 自贡发布智能仿真恐龙机器人-新华网 http://www.sc.xinhuanet.com/20251001/076550f657474327a7f595a0abfc4775/c.html
[17] 自贡仿真恐龙智能升级驱动新春文旅创新 https://www.iesdouyin.com/share/video/7595433557900660010
[18] “智”龙行天下!看自贡仿真恐龙如何领跑全球赛道_自贡观察 http://m.toutiao.com/group/7565785464892850697/
[19] DB51/T 2877-2022 仿真恐龙(自贡)通用技术规范_四川省地方标准_库七七 https://kqqw.com/db51/317470.html
[20] DB51/T 2877-2022 仿真恐龙(自贡)通用技术规范 -工标网 http://wap.csres.com/detail/390333.html
[21] 如何定制主题公园仿真机模展品?_动态_动作_表皮 https://m.sohu.com/a/883569356_122262193/
[22] 骨架-恐龙化石-产品介绍-自贡仿真恐龙模型生产制作厂家、仿真动物定制源头工厂--汇龙堂仿真产业基地 /list/cp/klhs-gj.html
[23] 全新 一代 仿生 三角 龙 重磅 登场 ! 3D 建模 打印 + 精密 伺服 系统 , 我们 不只 复原 三角 龙 外形 , 更 是 赋予 它 灵魂 # 仿生 恐龙 # 三角 龙 # 恐龙 模型 # 仿真 恐龙 厂家 # 亘古 智造 https://www.iesdouyin.com/share/video/7564344760161406254
[24] 一种单人操控仿真机械恐龙 https://patentimages.storage.googleapis.com/da/36/5d/1fdd9707d7436f/CN205198962U.pdf
[25] 自贡仿真恐龙产业迈向智能化新纪元:从“静态展示”到“行走互动”的科技蝶变_金台资讯 http://m.toutiao.com/group/7560609086203544118/
[26] “智”龙行天下!看自贡仿真恐龙如何领跑全球赛道_自贡观察 http://m.toutiao.com/group/7565785464892850697/
[27] 交易者简放的微博 https://m.weibo.cn/detail/5269077275707024
[28] 仿真恐龙-仿真恐龙-产品介绍-自贡仿真恐龙模型生产制作厂家、仿真动物定制源头工厂--汇龙堂仿真产业基地 /list/cp/fzkl-tp.html
[29] 全新 一代 仿生 三角 龙 重磅 登场 ! 3D 建模 打印 + 精密 伺服 系统 , 我们 不只 复原 三角 龙 外形 , 更 是 赋予 它 灵魂 # 仿生 恐龙 # 三角 龙 # 恐龙 模型 # 仿真 恐龙 厂家 # 亘古 智造 https://www.iesdouyin.com/share/video/7564344760161406254
[30] 自贡发布智能仿真恐龙机器人-新华网 http://www.sc.xinhuanet.com/20251001/076550f657474327a7f595a0abfc4775/c.html
[31] 自贡:让侏罗纪时代的恐龙“活起来”_中国新闻网 http://m.toutiao.com/group/7557975810418754099/
[32] 自贡智能恐龙走向全球舞台 https://dp.zgm.cn/show/38160
[33] 越疆“复活”中华龙鸟,全球首个超仿生具身智能体面世! https://www.nfnews.com/content/ry5OEm7O6Z.html
[34] 2025及未来5年玩具用关节项目投资价值分析报告.docx-原创力文档 https://m.book118.com/html/2025/1210/7020026143011022.shtm
[35] (正式版)DB51∕T 2877-2022 《仿真恐龙(自贡)通用技术规范》.docx-原创力文档 https://m.book118.com/html/2026/0305/8036110141010050.shtm
[36] DB5103/T 13-2019 自贡仿真恐龙通用规范 - 标准全文下载 - 手机版 - Powered by Discuz! https://www.qbw86.com/post-166406-1-1.html
[37] 机构检索 - 全国标准信息公共服务平台 https://std.samr.gov.cn/search/orgOthers?q=%E5%9B%9B%E5%B7%9D%E7%9C%81%E4%BC%97%E9%91%AB%E5%BD%A9%E7%81%AF%E6%96%87%E5%8C%96%E4%BC%A0%E6%92%AD%E6%9C%89%E9%99%90%E5%85%AC%E5%8F%B8
[38] 仿真霸王龙模型制作细节与改进建议探讨 https://www.iesdouyin.com/share/video/7514988217475042617
[39] DB51/T 2877-2022 仿真恐龙(自贡)通用技术规范_标准下载 - 建标网 - www.jz321.net https://www.jz321.net/difang/120850.html
[40] DB51∕T 2877-2022 仿真恐龙(自贡)通用技术规范(四川省) 免费阅读可下载_天天文库 https://m.wenku365.com/p-81078844.html
[41] DB51/T 2877-2022 仿真恐龙(自贡)通用技术规范 -工标网 http://wap.csres.com/detail/390333.html
[42] “智”龙行天下!看自贡仿真恐龙如何领跑全球赛道_自贡观察 http://m.toutiao.com/group/7565785464892850697/
[43] 自贡市汇龙堂文化艺术有限公司 - 企查查 https://m.qcc.com/firm/84d51ccb853f64f674fb6c15e27ee320.html
[44] 自贡市汇龙堂文化艺术有限公司 https://shuidi.cn/company-10d1606a6be6bd696b09622965edcf06.html?from=doubao
[45] 仿真恐龙-仿真恐龙-产品介绍-自贡仿真恐龙模型生产制作厂家、仿真动物定制源头工厂--汇龙堂仿真产业基地 /list/cp/fzkl-tp.html
[46] 全新 一代 仿生 三角 龙 重磅 登场 ! 3D 建模 打印 + 精密 伺服 系统 , 我们 不只 复原 三角 龙 外形 , 更 是 赋予 它 灵魂 # 仿生 恐龙 # 三角 龙 # 恐龙 模型 # 仿真 恐龙 厂家 # 亘古 智造 https://www.iesdouyin.com/share/video/7564344760161406254
[47] 一种单人操控仿真机械恐龙 https://patentimages.storage.googleapis.com/da/36/5d/1fdd9707d7436f/CN205198962U.pdf
[48] 一种仿生恐龙的机械结构 https://patentimages.storage.googleapis.com/50/51/ec/c7044be98d526f/CN109733499B.pdf
[49] 一种行星齿轮与伺服电机集成的关节传动组件2025.pdf专利下载-原创力专利 https://zhuanli.book118.com/view/1m908x0254p4692106967488.html
[50] 一种仿真动物关节转动固定结构专利_专利申请于2024-08-19_专利查询 - 天眼查 https://m.tianyancha.com/zhuanli/00e0f57d582b82f2d5f436aae2658896
[51] 骨架-恐龙化石-产品介绍-自贡仿真恐龙模型生产制作厂家、仿真动物定制源头工厂--汇龙堂仿真产业基地 /list/cp/klhs-gj.html
[52] 一种单人操控仿真机械恐龙 https://patentimages.storage.googleapis.com/da/36/5d/1fdd9707d7436f/CN205198962U.pdf
[53] 全新 一代 仿生 三角 龙 重磅 登场 ! 3D 建模 打印 + 精密 伺服 系统 , 我们 不只 复原 三角 龙 外形 , 更 是 赋予 它 灵魂 # 仿生 恐龙 # 三角 龙 # 恐龙 模型 # 仿真 恐龙 厂家 # 亘古 智造 https://www.iesdouyin.com/share/video/7564344760161406254
[54] 如何定制主题公园仿真机模展品?_动态_动作_表皮 https://m.sohu.com/a/883569356_122262193/
[55] QingLoong Full-Size Universal Humanoid Robot Hardware Open-Source Content https://github.com/loongOpen/OpenLoong-Hardware
[56] (12)发明专利申请 https://patentimages.storage.googleapis.com/9e/22/a9/827822eb622938/CN107009364A.pdf
[57] 成都智造“唤醒”千年龙乡IP,全球首款智能仿生恐龙震撼发布_全国党媒信息公共平台 http://m.toutiao.com/group/7555873032276034089/
[58] 自贡造“霸王龙”现身“苏超” 解说员惊呼:“这可能是地球史上最硬核的啦啦队!”_封面新闻 http://m.toutiao.com/group/7518805057111097897/
[59] 霸王龙、迅猛龙……“苏超”常州主场的“恐龙啦啦队”来自四川自贡!_封面新闻 http://m.toutiao.com/group/7518804966505562651/
[60] 四川自贡仿真恐龙亮相常州苏超主场助阵 https://www.iesdouyin.com/share/video/7518795470156614970
[61] “智”龙行天下!看自贡仿真恐龙如何领跑全球赛道_自贡观察 http://m.toutiao.com/group/7565785464892850697/
[62] 自贡智能恐龙走向全球舞台 https://dp.zgm.cn/show/38160
[63] 渝友圈|四川自贡唤醒“呆脑兽” 智能仿生恐龙“智造”新未来-华龙网 http://www.cqnews.net/1/detail/1429846125084483584/app/content_1429846125084483584.html
[64] 自贡仿真恐龙产业迈向智能化新纪元:从“静态展示”到“行走互动”的科技蝶变 http://sc.people.com.cn/n2/2025/1013/c345167-41378533.html
[65] 仿真恐龙-仿真恐龙-产品介绍-自贡仿真恐龙模型生产制作厂家、仿真动物定制源头工厂--汇龙堂仿真产业基地 /list/cp/fzkl-tp.html
[66] 动态雕塑定制与仿真机模工艺创新_搜狐网 https://m.sohu.com/a/873951839_122262193/
[67] 如何定制主题公园仿真机模展品?_动态_动作_表皮 https://m.sohu.com/a/883569356_122262193/
[68] 全新 一代 仿生 三角 龙 重磅 登场 ! 3D 建模 打印 + 精密 伺服 系统 , 我们 不只 复原 三角 龙 外形 , 更 是 赋予 它 灵魂 # 仿生 恐龙 # 三角 龙 # 恐龙 模型 # 仿真 恐龙 厂家 # 亘古 智造 https://www.iesdouyin.com/share/video/7564344760161406254
[69] 仿真恐龙_电动机械电子恐龙制作流程材质工艺介绍恐龙是怎么做的_自贡市源中圆科技有限公司 http://www.cdkf.cn/M/fzkl-271.html
[70] 自贡仿真恐龙产业迈向智能化新纪元:从“静态展示”到“行走互动”的科技蝶变_金台资讯 http://m.toutiao.com/group/7560609086203544118/
[71] 自主研发精密传动技术革新仿真恐龙动作逼真度 https://www.iesdouyin.com/share/video/7530863579283016986
[72] 一种单人操控仿真机械恐龙 https://patentimages.storage.googleapis.com/da/36/5d/1fdd9707d7436f/CN205198962U.pdf
[73] 仿真恐龙-仿真恐龙-产品介绍-自贡仿真恐龙模型生产制作厂家、仿真动物定制源头工厂--汇龙堂仿真产业基地 /list/cp/fzkl-tp.html
[74] 唤醒呆脑兽 智造新未来_自贡观察 http://m.toutiao.com/group/7559889209914294830/
[75] 畸 王龙 2 . 0 测试 件 , 年后 批量 做 , 非常 完美 https://www.iesdouyin.com/share/video/7607101484262776211
[76] 一种恐龙机器人的脖子和尾巴摆动机构的制作方法 https://www.xjishu.com/zhuanli/14/201610453663.html
[77] 腕龙属[蜥臀目腕龙科下的一个属]_百科 https://m.baike.com/wiki/%E8%85%95%E9%BE%99%E5%B1%9E/19311553
[78] 如何通过动态雕塑定制提升仿真机模互动性?_模型_机械_装置 https://www.sohu.com/a/885076049_122262193
[79] 仿生四足机器人 https://patentimages.storage.googleapis.com/53/76/6b/57db39ec1eff0b/CN112298398B.pdf
(注:文档部分内容可能由 AI 生成)
Copyright © 2010-2025 hltkl.com All rights reserved. 自贡市汇龙堂文化艺术有限公司 版权所有
联系地址:四川省自贡市沿滩区永安镇金银湖高速路口左行1.6KM汇龙堂仿真恐龙园 邮政编码:643000
垂询热线:13990038104 联系电话:0813-8114400 mail:master@dinosaur.cc ICP备案号:蜀ICP备12016509号-1 技术支持:四川百信智创科技有限公司
13990098041